






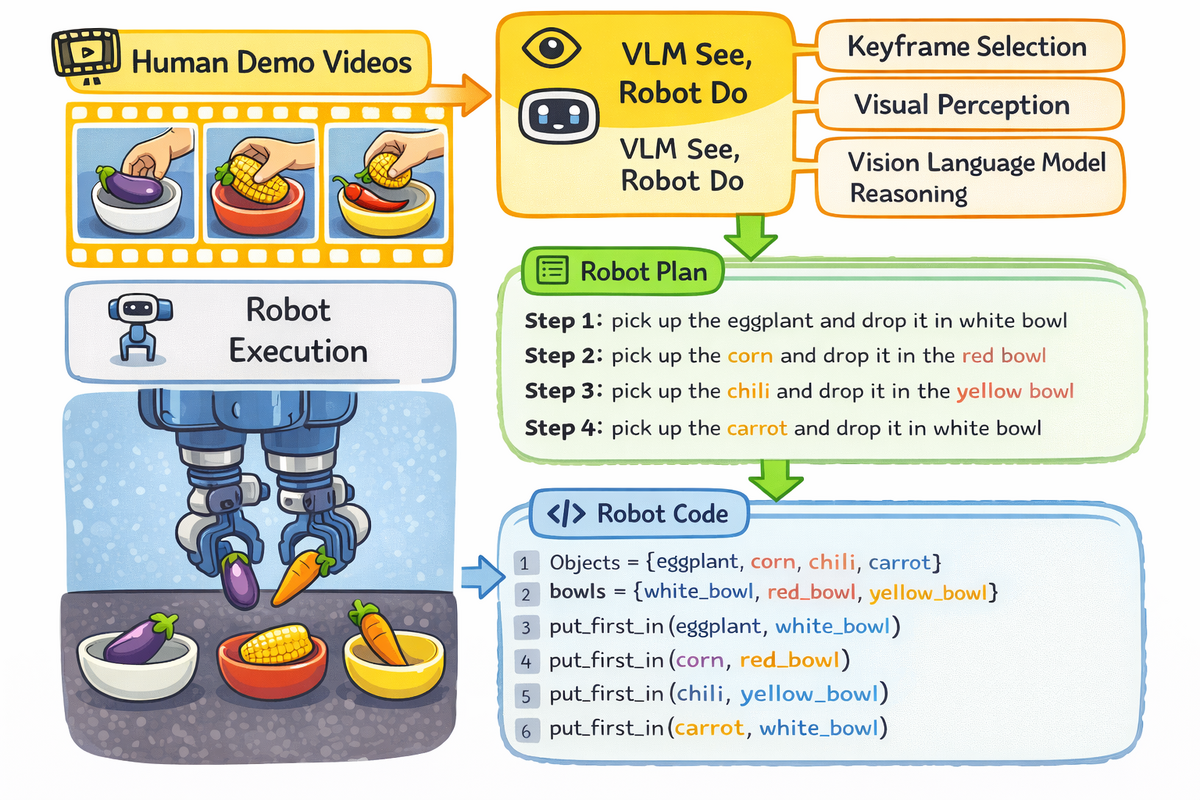
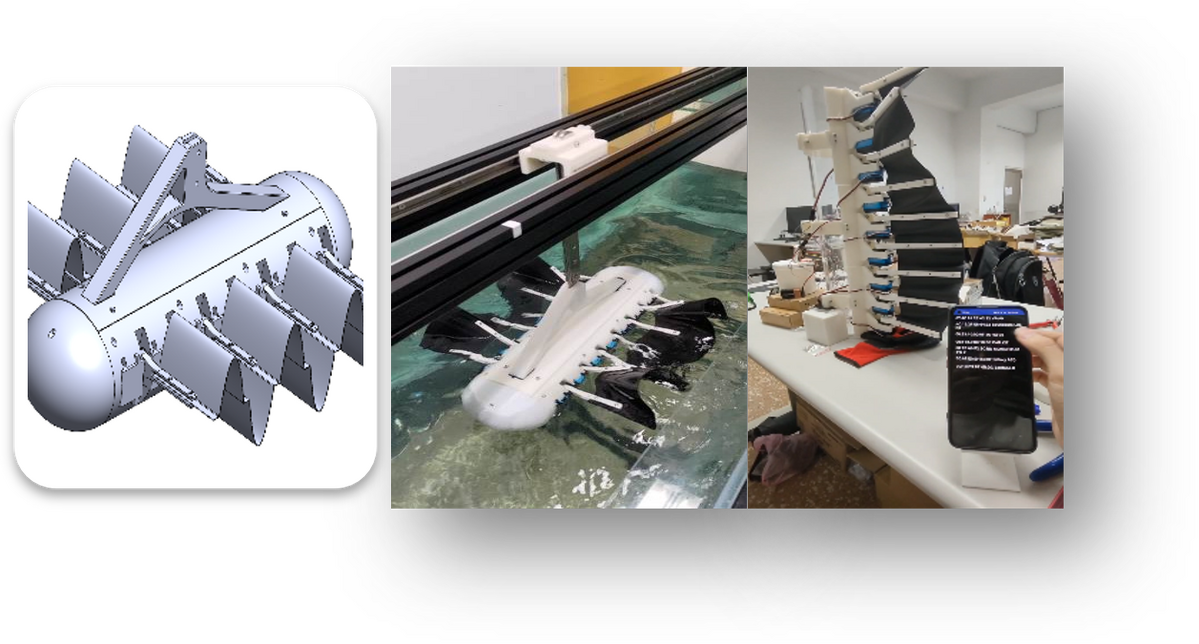
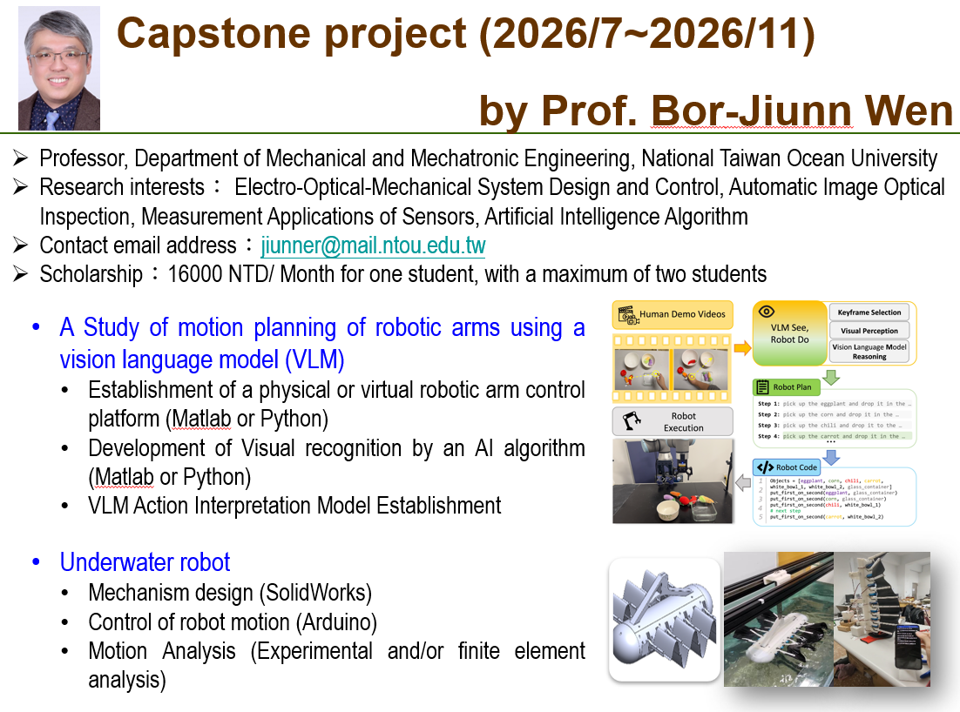
This research consists of two main topics. First, in robotic arm motion planning, a vision-language model (VLM) is integrated with AI algorithms to develop an intelligent control system that combines visual perception and semantic understanding. The study includes establishing a physical or virtual robotic arm control platform using Matlab or Python, developing visual recognition models to capture environmental information, and constructing a VLM-based action interpretation model that translates semantic instructions into executable motion trajectories, thereby enhancing automation and human–robot interaction. Second, in the underwater robot study, the focus is on the integration of mechanism design and motion control. SolidWorks is used for mechanical design and simulation, while Arduino is employed to implement the motion control system. Motion performance is evaluated through experimental testing and/or finite element analysis. These two research directions address intelligent perception-driven decision-making and mechatronic system integration, aiming to develop autonomous robotic systems capable of operating in complex environments. *Participating students must be senior undergraduates or above in engineering departments, including graduate students. *Our research team can provide 16000 NTD/ Month for one student, with a maximum of two students. Accommodation can be arranged, but students will need to pay for it themselves.
![]()
- Field: Engineering
- School: National Taiwan Ocean University
- Organizer: Department of Mechanical and Mechatronic Engineering, National Taiwan Ocean University
- Period of Apply: 2026/04/01-2026/05/31
- Term: 2026/07/01-2026/11/30
- Fee: Students must pay for their own accommodation.
- Website of Program: me.ntou.edu.tw/p/412-1057-8014.php?Lang=zh-tw
{kind=link}
{kind=link}
{kind=link}
- Contact Person:Bor-Jiunn Wen
- Email:jiunner@mail.ntou.edu.tw,jiunner@gmail.com
- Phone:+886-2-24622192 ext. 3247